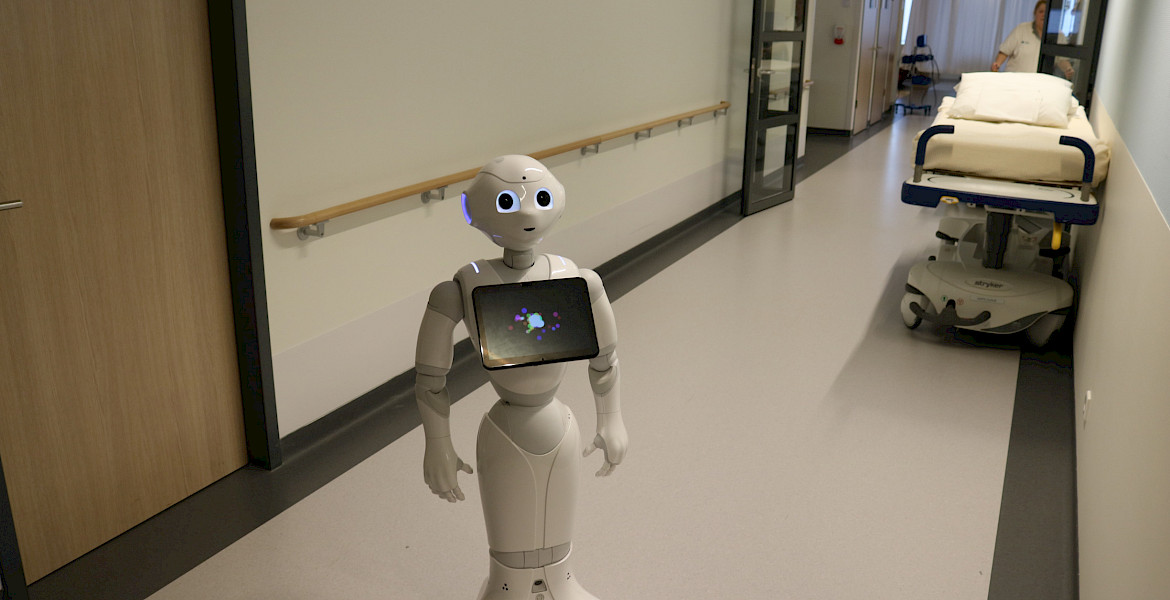
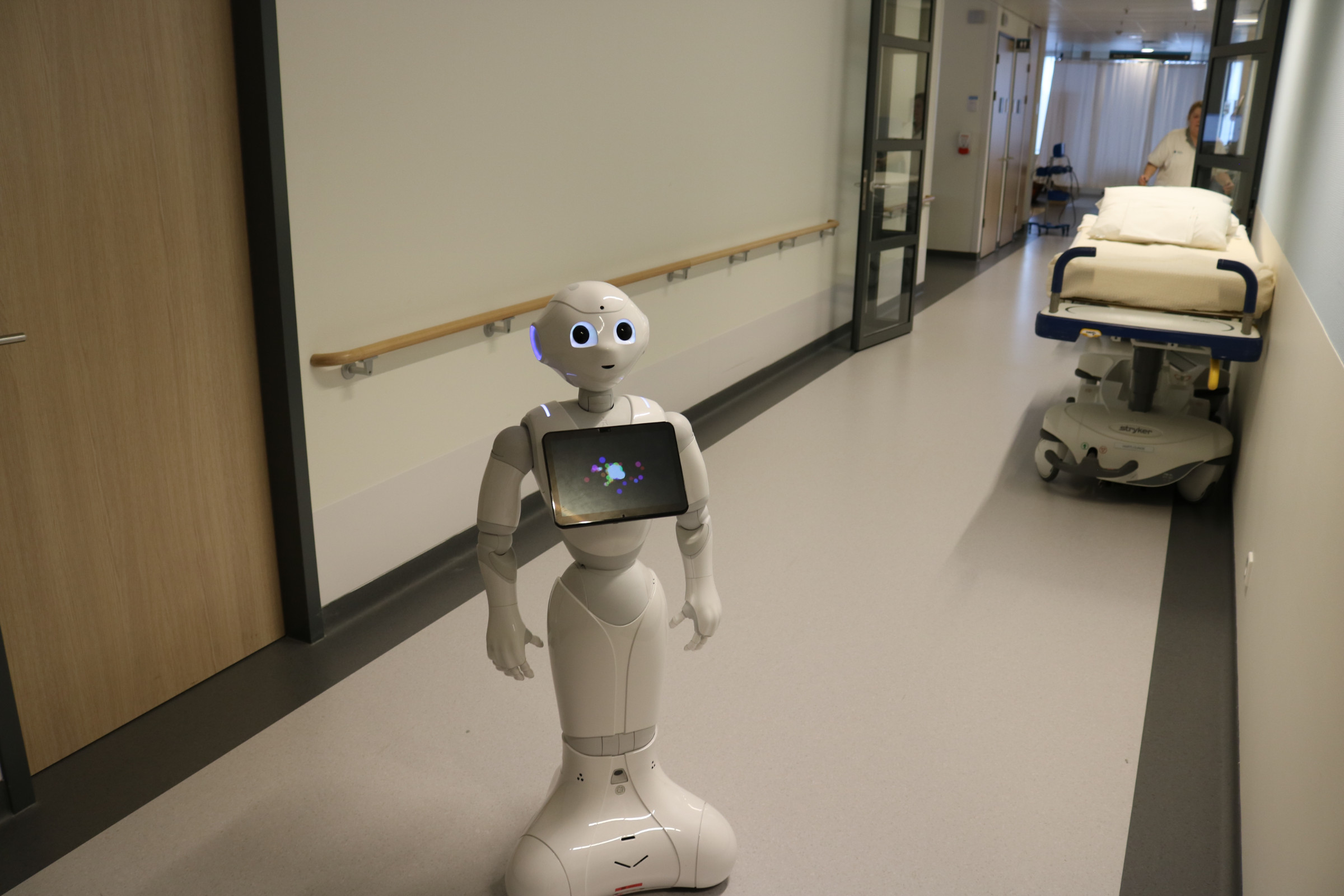
This research initiative is about the programming and modeling of robots for healthcare. A series of student projects have been, and are, conducted, for the recovery section of the heart surgery department in Catharina Hospital in Eindhoven. The Robot4Care should help reactivating operated patients and informing relatives of these patients about preventive and reactivation measures.
The starting point for this research is our observation that care departments as well as care at home have high expectations about care robots, but that ‘the robot technology’ is not yet able to match those requirements. This does often result in a department manager that buys an expensive robot and put the same robot in a cupboard because it is not active anymore. This is partly due to hardware problems like non-functioning sensors, which might for mean that the lidar does not function sufficiently for reliable navigation. Apart from the hardware, we are convinced of the importance of human robot interaction. From the perspective of human robot cooperation we focus on software development.
Our applied research question is: how to program and model the software for a Robot4Care so that its control software is modular and robust? Modular because the software consists of components and is therefore is maintainable and expandable with new actions (skills). The robot should be enabled to adapt to new situations in the care departments or for changing conditions in other departments or at care situations at home. Robust means that the robot itself is robust for activities in unstructured (care)situations; that the robot is able to react in alternatives to the planned scenarios. This is relevant in the care context where the robot has to interact with humans; the Robot4Care is a cobot.
To achieve modularity and robustness we apply behavior trees as a modeling approach for the decision making of the robot. Several robot skills are important for the Robot4Care, such as person and object detection, person recognition, and navigating along the recovery section. The behavior tree, defining the actions, by an implementation via skills, helps for robust en modular definition of the robot decision taking.
Activities
- Co-programmer of the Thema maand Healthcare Ontzorgt software de zorg? October 2020.
- Knowledge exchange Fontys and de Heer Medicom presenting their experiences with their care robots.
- Article on Digital Twinning in Robot4Care.
Studentgroups:
- Fall 2019 – Minor Embedded Systems
- Spring 2020
- Semester 6 ICT & Technology
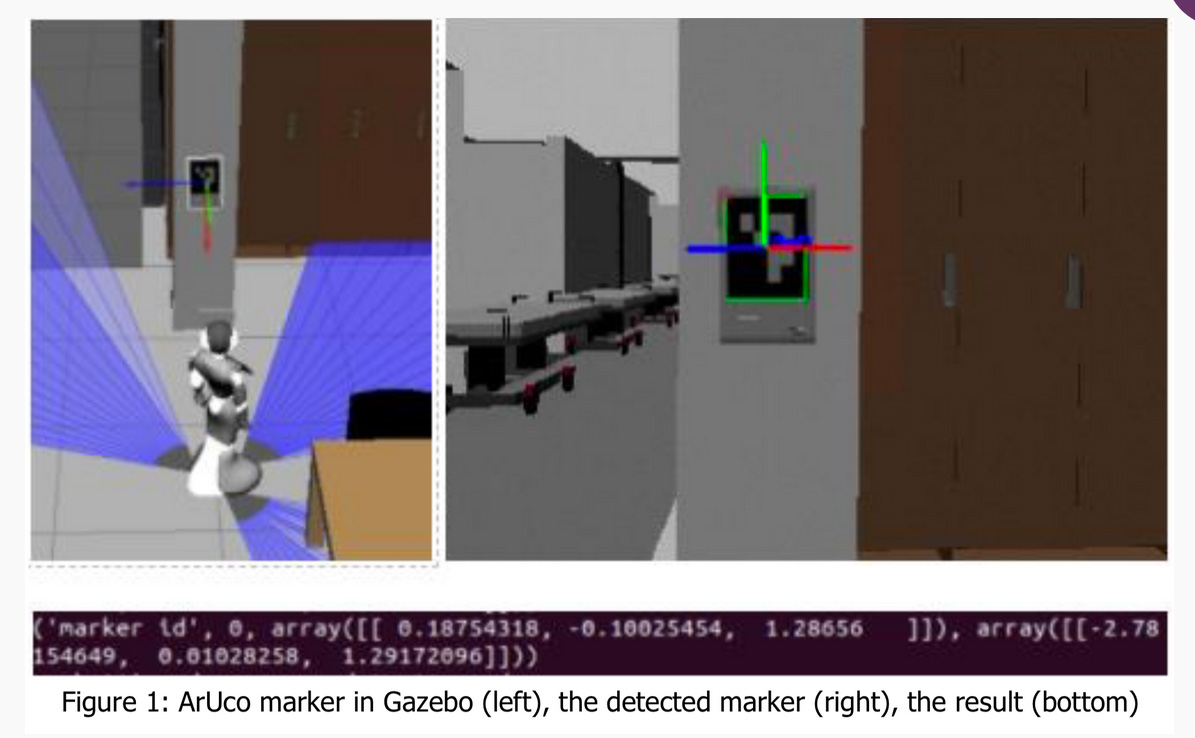
- Development of Gazebo model: a simulated world of the heart lounge that can be used as testing ground for executing the tree and skills.
- Fall 2020 – Minor Embedded Systems
- Spring 2021 – Semester 6 ICT & Technology
- Fall 2021 - Semester 7 Embedded Systems
- Spring 2022 - Semester 6 ICT & Technology
- Fall 2022 - Semester 6 ICT & Technology
- Spring 2023 - Semester 6 ICT & Technology











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}