Software components for an autonomous egg picking robot are developed. The robot does the automatic picking of eggs, ensuring the trace between egg and parent for Partner in Innovation Hendrix Genetics. The robot should support when tracing the phenotypes (genetic characteristics) of the hatching.
The focus of the applied research is on developing the components, to enable the integration into an autonomous robot. The integrated components should result in a robot platform to enable robot modeling. Several student projects has worked on three functionalities:
- egg gripping – planned to be implemented by a robot arm,
- egg transportation – planned to be implemented by a mobile platform,
- egg finding – by computer vision.
Student projects
- Fall 2019 – Minor Embedded Systems – Egg gripper
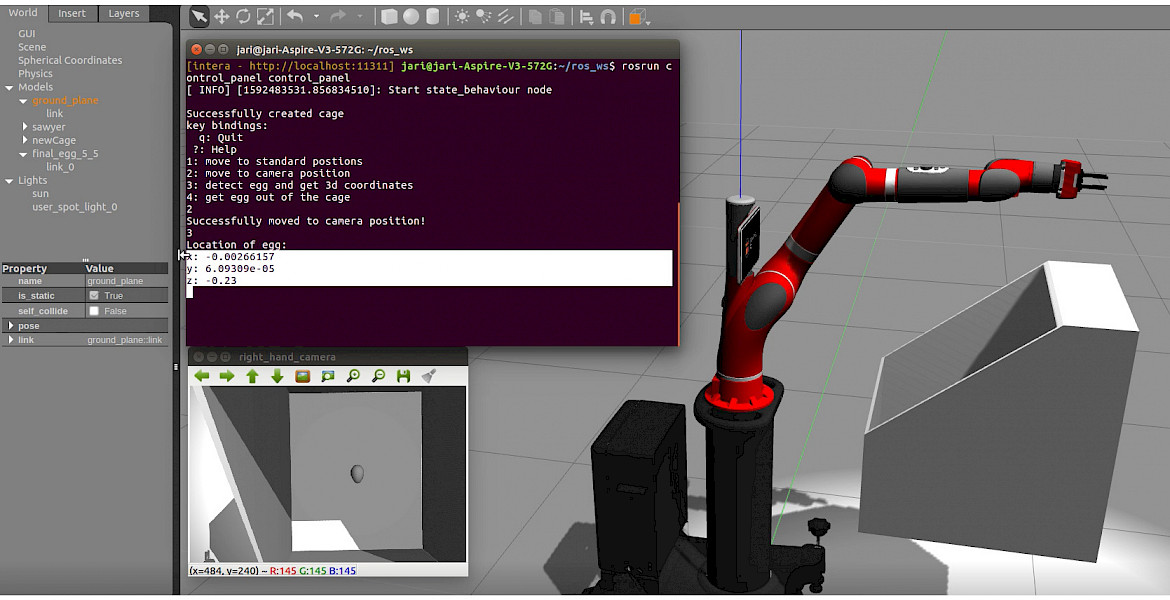
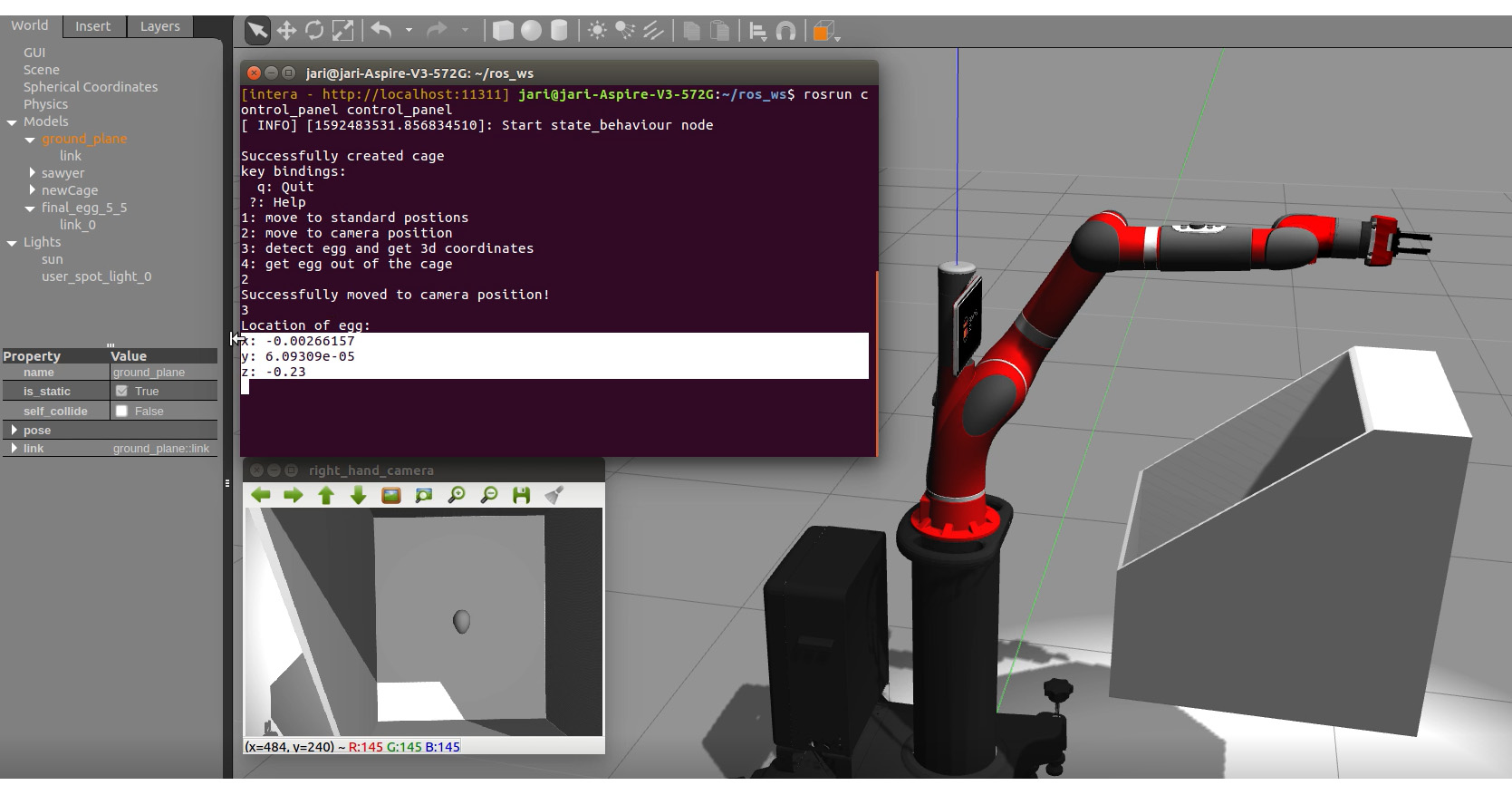
- Spring 2020 – Semester 6 ICT & Technology – Robot arm (Sawyer)
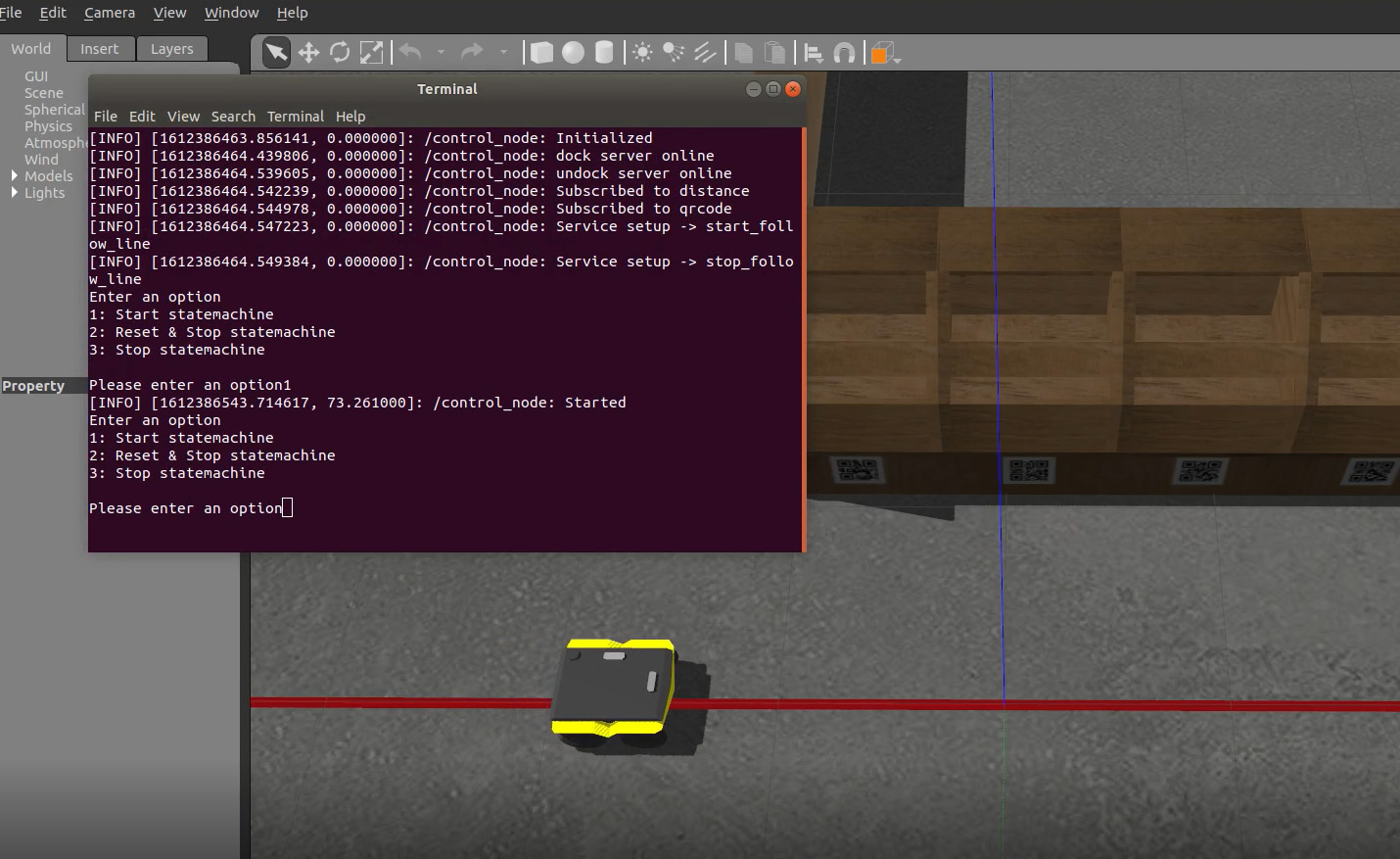
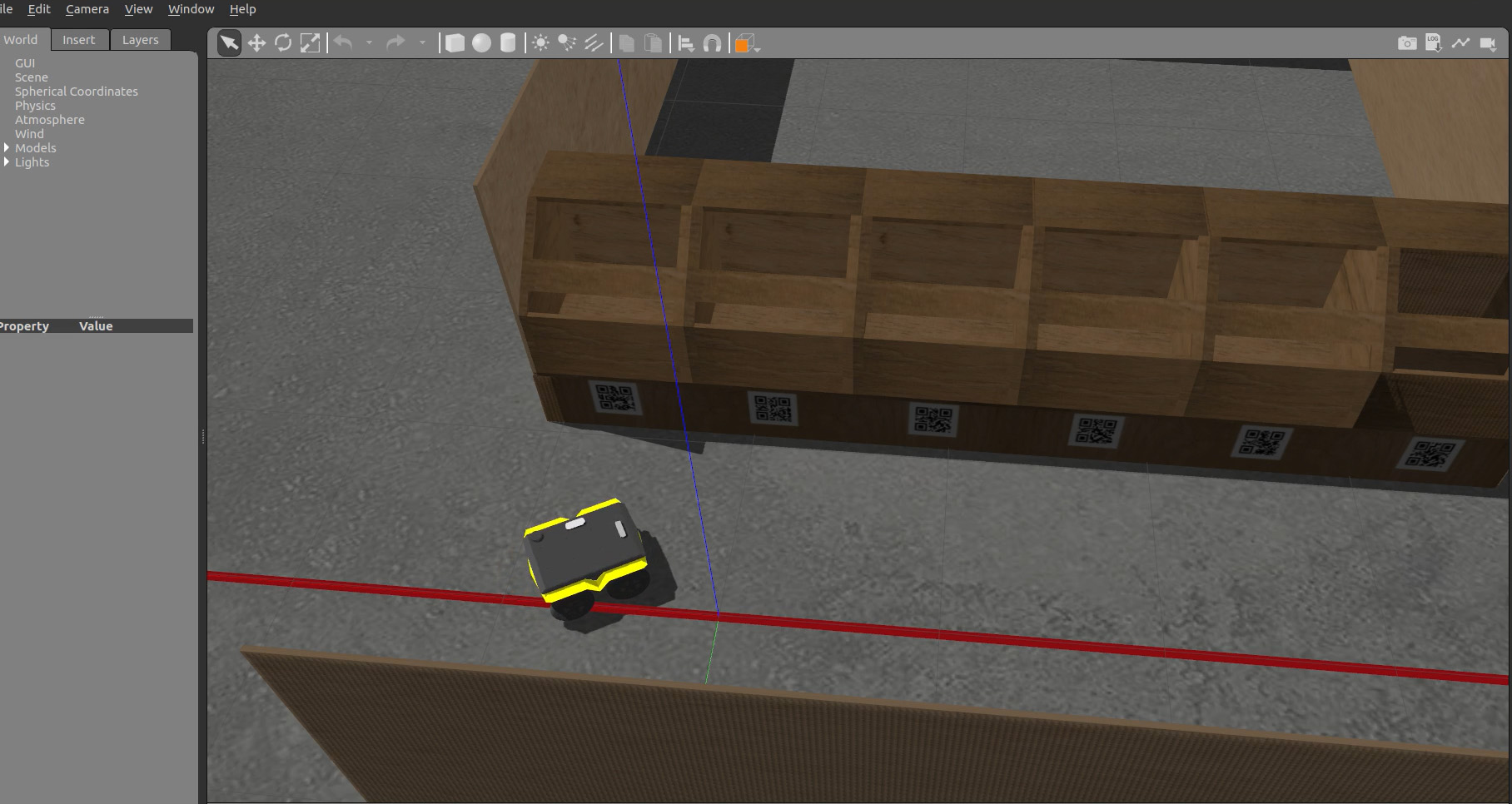
- Fall 2020 – Minor Embedded Systems – Mobile platform (Jackal Clearpath) in (Gazebo) simulator










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}