About
The research group (Dutch: lectoraat) High Tech Embedded Software (HTES) wants to conduct practice-oriented research (Dutch: praktijkgericht onderzoek) on Smart Systems, also known as Cyber Physical Systems. Its research methodology is design-oriented and action-based in the tradition of evidence-based software engineering.
The mission of the HTES research group is to improve the knowledge and skills in the field of embedded software, of employees and students of FHICT and the companies we work with.
The research group observes various competence and knowledge challenges for training people at higher vocational education level in the Dutch and European high tech sector. These are the starting point of its applied research. These training challenges are in the architecture and the integration and testing of Cyber Physical Systems software (CPS). To reason about architecture and integration & test, it is necessary to progress on modelling with universities of applied sciences to find their role in future embedded software development. In addition, Artificial Intelligence offers possibilities for future software engineers. Therefore modeling and learning (in Dutch: modelleren) are the focus of the research group. The research into modeling and (machine) learning, that is done for the purpose of improving architecture and integration & test, must lead to systems with a certain (software) quality. The lectorate uses the ISO 25010 dictionary to describe software quality. The focus is on cyber security of IoT and robots. In the long run, the research group want to focus on sustainable software.
The research groups focuses on two CPS application areas: autonomous robot and sensor networks (as major ingredient of internet of things (IoT)). The research group is als interested in its assemblies, so-called Systems-of-Systems.
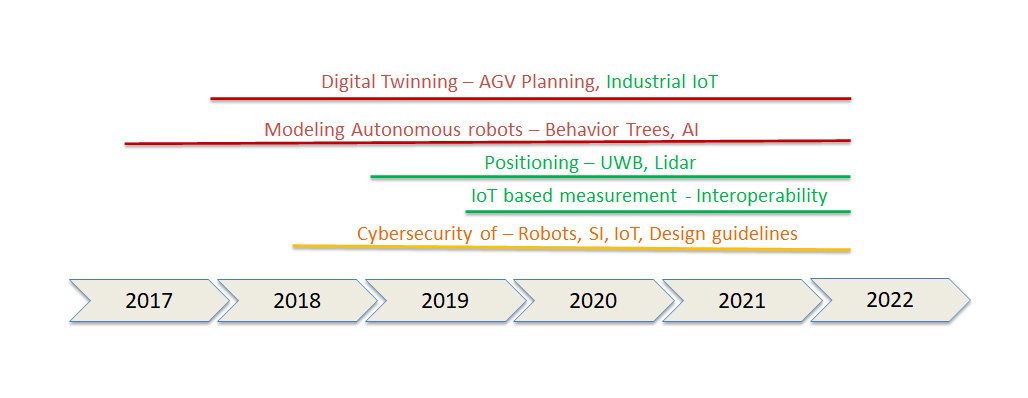
The research topics for the HTES research group are:
- Modeling Autonomous Robots - defining autonomous behavior and cooperation of robots
- Positioning of vehicles (mobile robots)
- Sensor networks - defining measurement systems based on IoT devices and adding intelligence to these networks
- Digital Twinning - modeling for digital twins, e.g., for robot planning and applying industrial IoT
- Cybersecurity of robots and IoT





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}