About
The MKB Let’s Move IT project aims at open fleet management for mobile robots, Automated Guided Vehicles (AGV’s) to drive safe, efficient and robust with various robots on future shopfloors. Various AGV’s exist like Vanderlande’s Fleet, Omron’s Adept, Probotics’ Pacman2000.
Our main research question is: how to cooperate safely and in a robust manner with different mobile robots brands and types on floors in warehouses and along production lines? The project focuses on mobile robot solutions for SME’s and larger companies. In today's shopfloor situation robots manufacturers like Omron, MIR provide their own fleet management system (fms) for their own AGV-brand. But what will happen if different brands and robot types –with their own fleet manager and/or intelligence aboard- will drive together? The project aims at reference architecture for mobile robots.
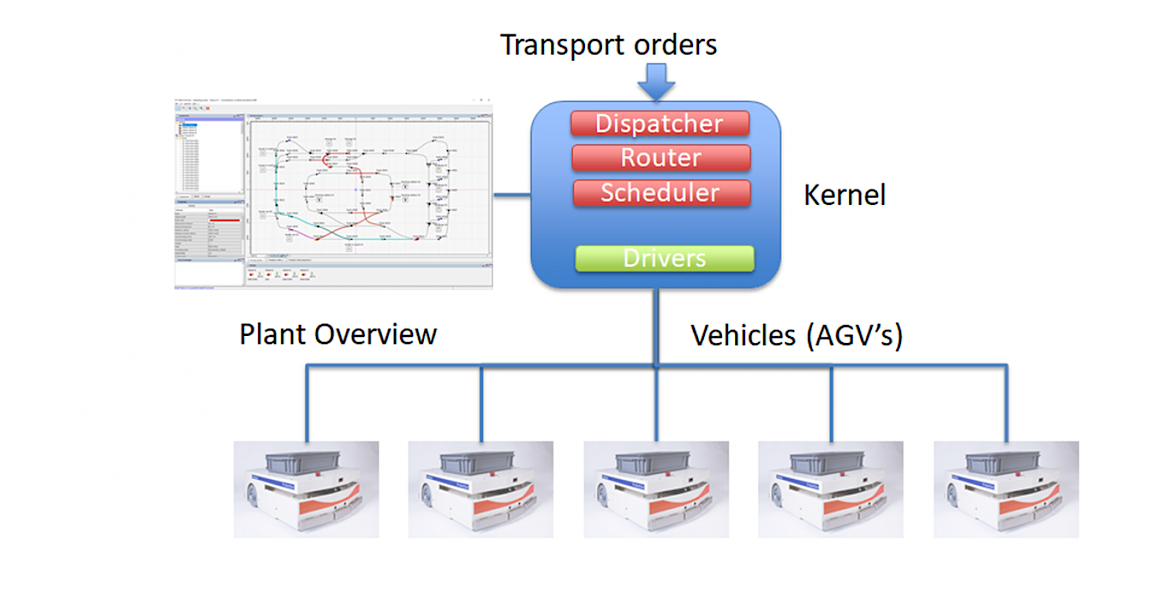
We focus on AGV planning and constructing an environment to experience with AGVs. For this a software adapter is developed that enables robots to work with the OpenTCS fleetmanager. The wrapper enables the execution of the scheduling results of MES/ERP level as well as it can handle with the ‘intelligence’ of the robot platform when this robot (or a combination of robot platform) is driving along the work floor. The adaptor is tested for the system throughput (the time moving from station A to B) and safety (obstacle avoidance and no humans are hurted). The robot platforms used along the project are miniature robots (Turtlebot3, Pi robots, EV3).
Furthermore, we examine the:
- Possibilities and constraints of applying a standard virtual platform (Unity 3D) for the purpose of planning the movements of (miniature) mobile robots. Demo of Turtlebot3 robot controlled by OpenTCS fleetmanager. Demo of a virtual robot in Unity 3D controlled by OpenTCS fleetmanager.
- Possibilities and features of indoor positioning (Ultra wide band, Pozyx) to allocate AGVs more precisely on the shopfloor.